The Treadmill-Based Tripping Perturbation
Hui-Ting Shih, Robert Gregor, Szu-Ping Lee
Abstract
The protocol utilized a side-by-side split-belt instrumented treadmill to simulate a trip-like perturbation. Compared to previously published methodologies, this new protocol is focused on delivering the perturbation at a precise timepoint during gait. Programmed treadmill belt acceleration profiles are triggered unilaterally at the instant the tripped leg bears 20-25% of the body weight in early stance phase. The belt acceleration profile starts from a comfortable walking speed, followed by a sudden slowdown, then an acceleration, and finally returning to the comfortable walking speed. The slowdown is meant to simulate the foot obstruction and the acceleration reproduces the leg-torso discoordination and the trunk forward thrust during a trip.
The last step in this version contains a supplemental video with extra context and tips, as part of the protocols.io Spotlight series, featuring conversations with protocol authors.
Before start
Please double check the setting for fall prevention/participant protection. We strongly suggest a safety harness to be installed and properly tested before applying the protocol to any individual. To ensure participants do not hit the ground, after fitting participants to the harness, we asked them sit in the harness and put their full body weight to it like playing on the swing and bending their knees. We adjusted the tether under this circumstance so that their knees would not hit the ground even in the most severe fall event. The adjusted tether length should not interrupt the participant’s gait. Padding can be added to the supporting struts and handrails to better protect the participants. In order to run the protocol, a few parameters need to be gathered including participants’ comfortable walking speeds for treadmill walking in m/s (or a designated speed decided by the research team) and their body weight in kg.
Attachments
Steps
The Treadmill-Based Tripping Perturbation
Turn on VICON motion capture system and open “Vicon Nexus".

Make sure the force platforms are enabled and available.

Turn on Bertec treadmill and open “Bertec treadmill". A treadmill control panel will pop out.

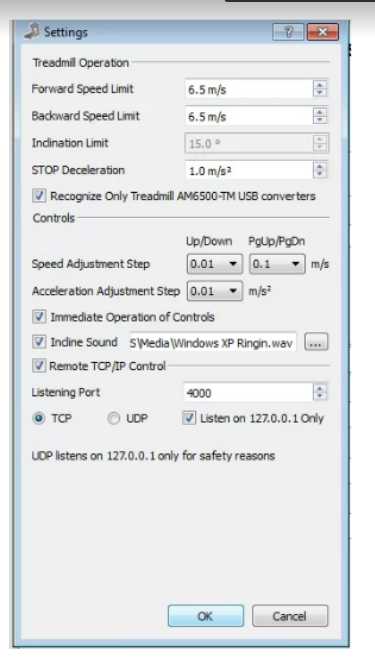
Click “Settings” > check “Remote TCP/IP Control”.


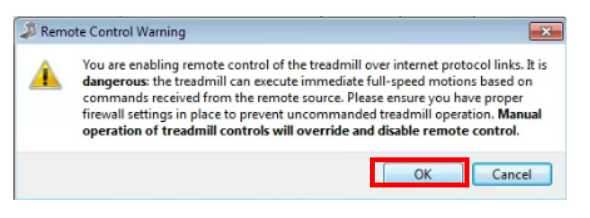
Click “OK” on the warning pop-out window.
Click “OK” on the Settings window. All the disabled remote-control functions (grey functions in step 4) should be enabled.
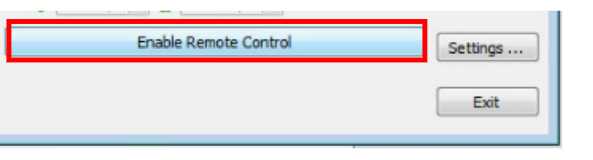
Click “Enable Remote Control” on the treadmill control panel.
Open “Matlab".

Open file: trip_version2.mlapp. Make sure all Matlab files are placed in the same folder.
Run this application. An UI Figure window will pop out showing the control panel.

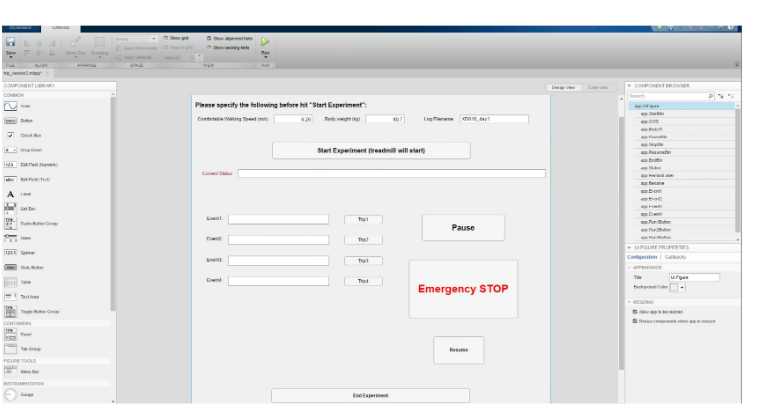
Input participant’s comfortable walking speed (m/s), body weight (kg), and filename. After typing in the filename, “Current Status” will show “Thank you for specify filename for log”.
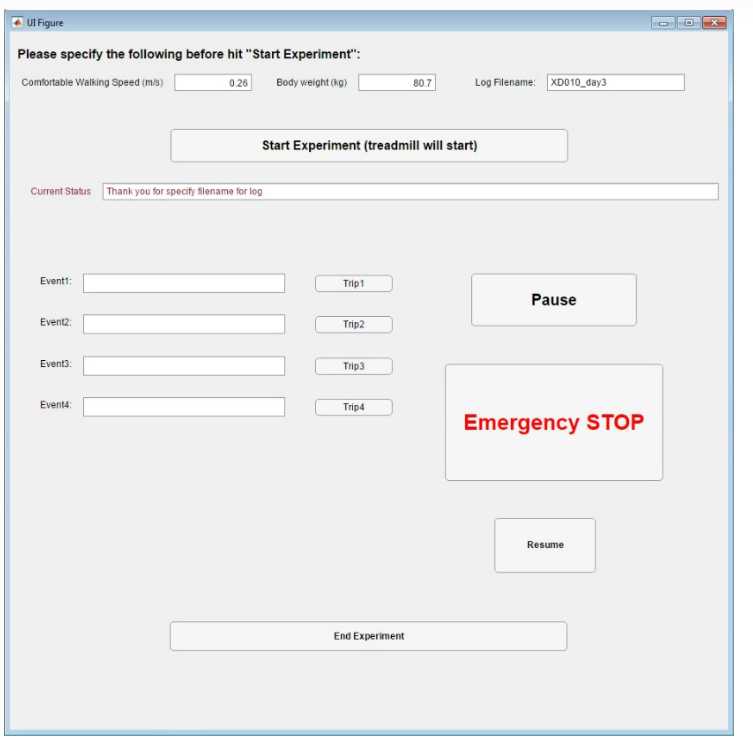
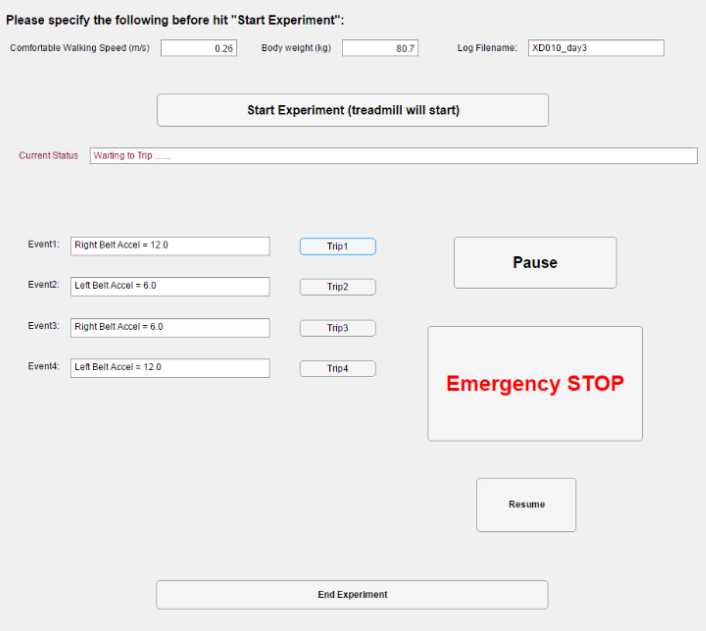
Click “Start Experiment”. The treadmill will start moving immediately and gradually accelerate until reaching the comfortable walking speed that was just input. “Current Status” will show “Bertec Treadmill: Connected”. In the meantime, Matlab automatically randomizes the 4 perturbation conditions (left/right x small/large) and assigns them as events 1 to 4.

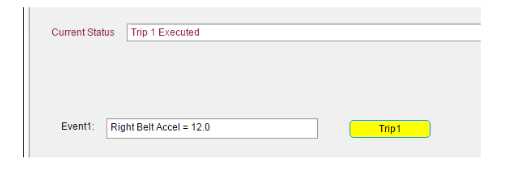
After participants reach a stable gait pattern, a researcher can click “Trip 1” to allow Matlab to begin screening the ground reaction force and automatically deliver the perturbation when the triggering criteria are met. Once the perturbation is delivered, the “Trip 1” button turns yellow. Matlab also shows the current status as “Waiting to Trip……” and “Trip 1 Executed”.
After a perturbation, participants may need some time to resume stable gait. Continue delivering the next perturbation by clicking “Trip 2” and repeat the same procedure for “Trip 3” and “Trip 4”.
The function “pause” will gradually slow down and stop the treadmill, and function “resume” will bring the treadmill velocity back and continue from where was left out. We recommend using these functions when participants need a short break. The “Emergency STOP” will stop the treadmill right way, forcing the treadmill velocity to be zero immediately, which we recommend using it when participants completely lose balance or in an emergency. After an emergency stop, it is required to close the application and re-run it (step 10).
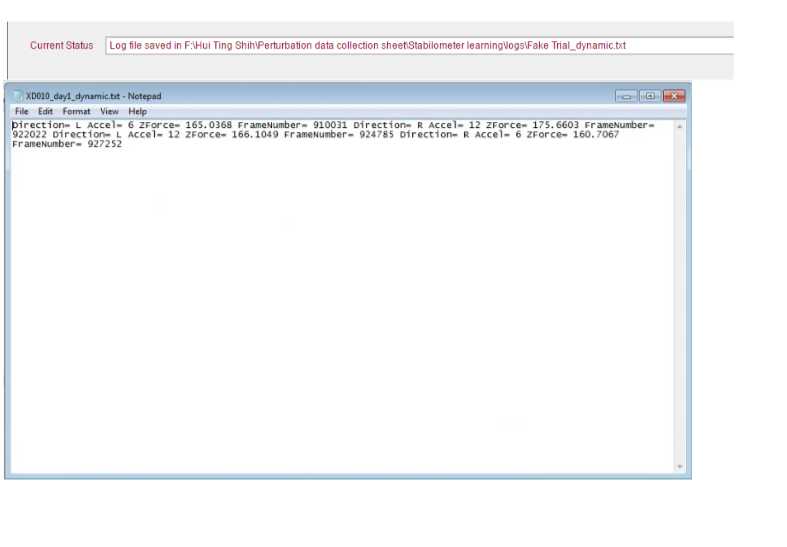
After successfully delivering all perturbations, click “End Experiment”. “Current Status” will show the complete path where the log file is saved. Matlab automatically saves a log file including the perturbation detail in sequence to the designated path with the input filename as “filename_dynamic.txt”. For example, for a trial with an input filename as “XD010_day1”, the log file will be named as “XD010_day1_dynamic.txt”. The log file includes direction (left or right), accel (acceleration; 6=small or 12=large), zForce (the vertical ground reaction value when the perturbation was delivered), and FrameNumber (the frame at which the perturbation was delivered).
Spotlight video
#尊敬的用户,由于网络监管政策的限制,部分内容暂时无法在本网站直接浏览。我们已经为您准备了相关原始数据和链接,感谢您的理解与支持。
<iframe title="YouTube video player" src="https://www.youtube.com/embed/uTN7TgrNkhY?si=sol1wV5LJddMFWNv" height="315" width="560"></iframe>
#尊敬的用户,由于网络监管政策的限制,部分内容暂时无法在本网站直接浏览。我们已经为您准备了相关原始数据和链接,感谢您的理解与支持。
<iframe title="YouTube video player" src="https://www.youtube.com/embed/uTN7TgrNkhY?si=sol1wV5LJddMFWNv" height="315" width="560"></iframe>
